The first human-powered hydrofoil to maintain flight was the “Flying Fish” that first flew for several minutes on July 6, 1983 on Puddingstone Reservoir near Los Angeles. It was designed, built and tested by Alec Brooks and Allan Abbott.
Brooks and Abbott met in 1975 at the inaugural International Human Powered Vehicle event for land vehicles held at the Irwindale Raceway, Irwindale, California. Alec is an engineer who received his PhD from California Institute of Technology, Allan is a family and sports medicine physician who received his M.D. from Indiana University. In the 1975 competition, they each competed in the 200-meter speed event with streamlined recumbent bicycles of their own design.
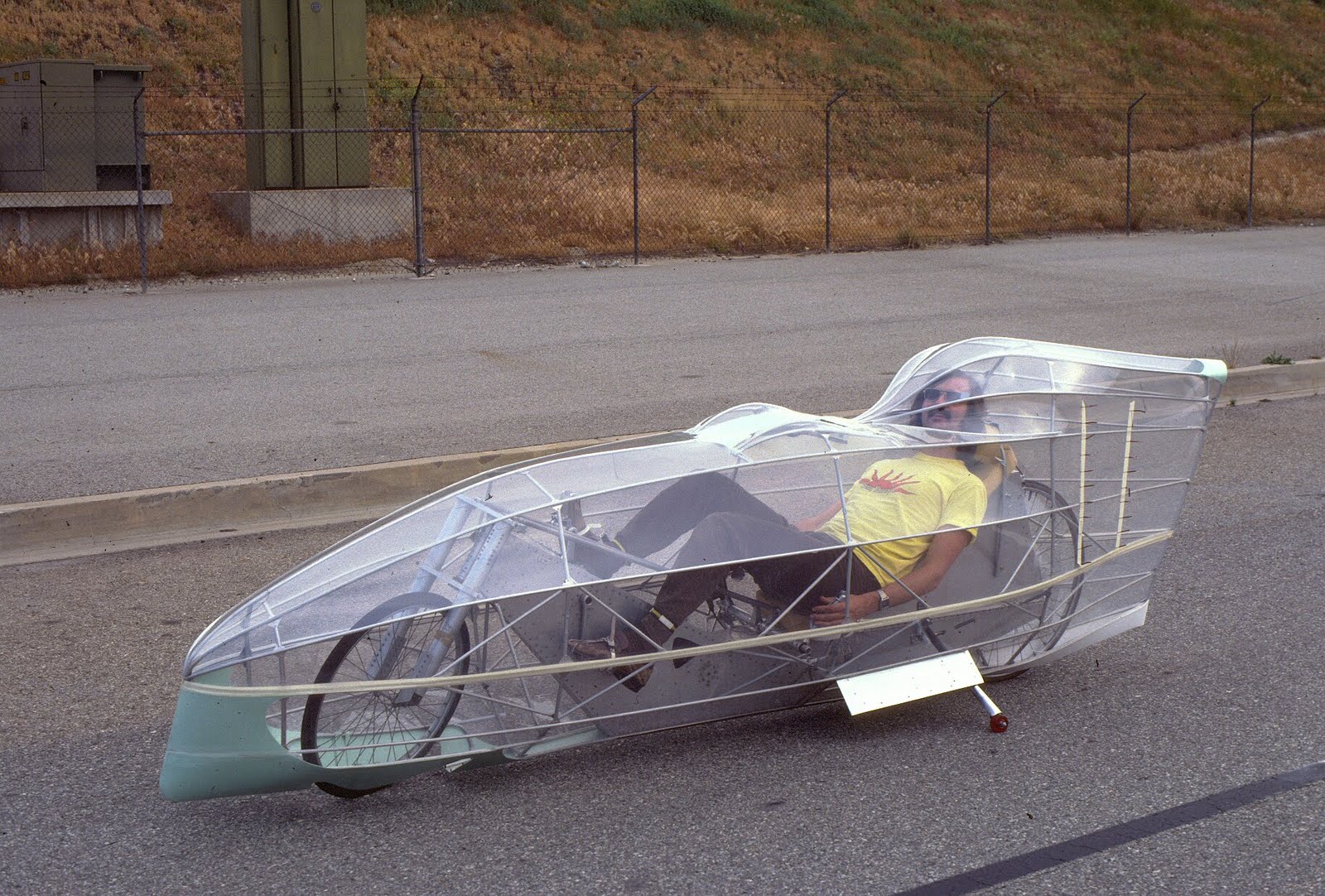 Alec in his supine recumbent bicycle
Alec in his supine recumbent bicycle
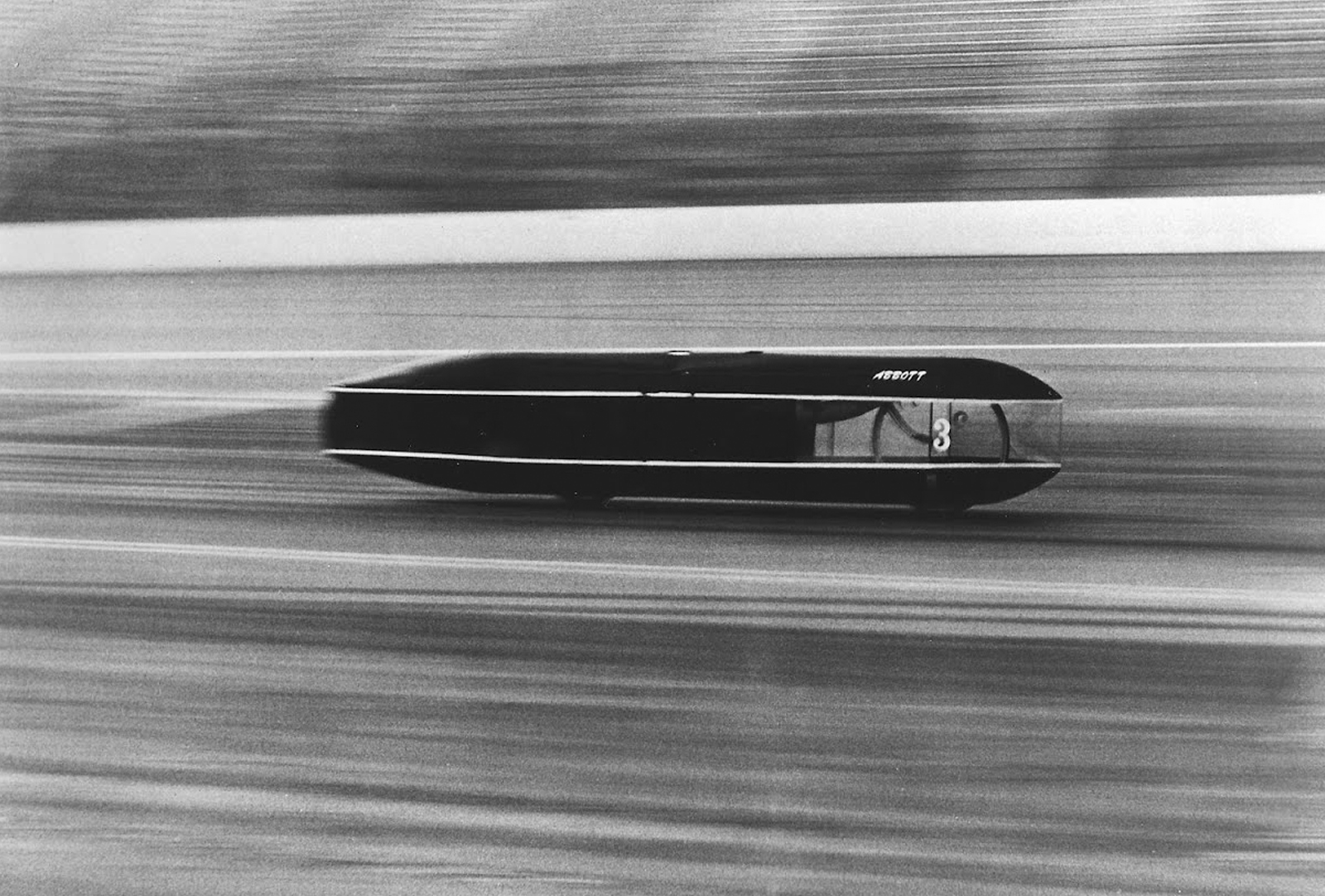 Allan racing his prone-position streamlined bicycle
Allan racing his prone-position streamlined bicycle
They became friends, and spent several years designing and racing recumbent bicycles. In 1982 they began collaborating on a project to develop a human-powered water vehicle that would outperform the fastest human-powered boat at the time, the racing rowing shell. At the time they were unaware of two earlier attempts to fly human-powered hydrofoils that resulted in short flights lasting a few seconds.
 The first known human powered hydrofoil: WasserLaufer, 1952 Video of WasserLaufer
The first known human powered hydrofoil: WasserLaufer, 1952 Video of WasserLaufer
 James Grogono briefly lifted his rowed shell on hydrofoils in 1975. (photo from: Icarus The Boat that Flies, James Grogono, 1987
James Grogono briefly lifted his rowed shell on hydrofoils in 1975. (photo from: Icarus The Boat that Flies, James Grogono, 1987
In 1979, MIT mechanical engineering student M. Bradham Brewster did his bachelor’s thesis on the design and development of a human powered hydrofoil. His thesis advisor was professor David Gordon Wilson, author of several books and many articles about bicycles and other human powered vehicles. Brewster did extensive design calculations and determined that human powered hydrofoils were possible and could be quite fast.
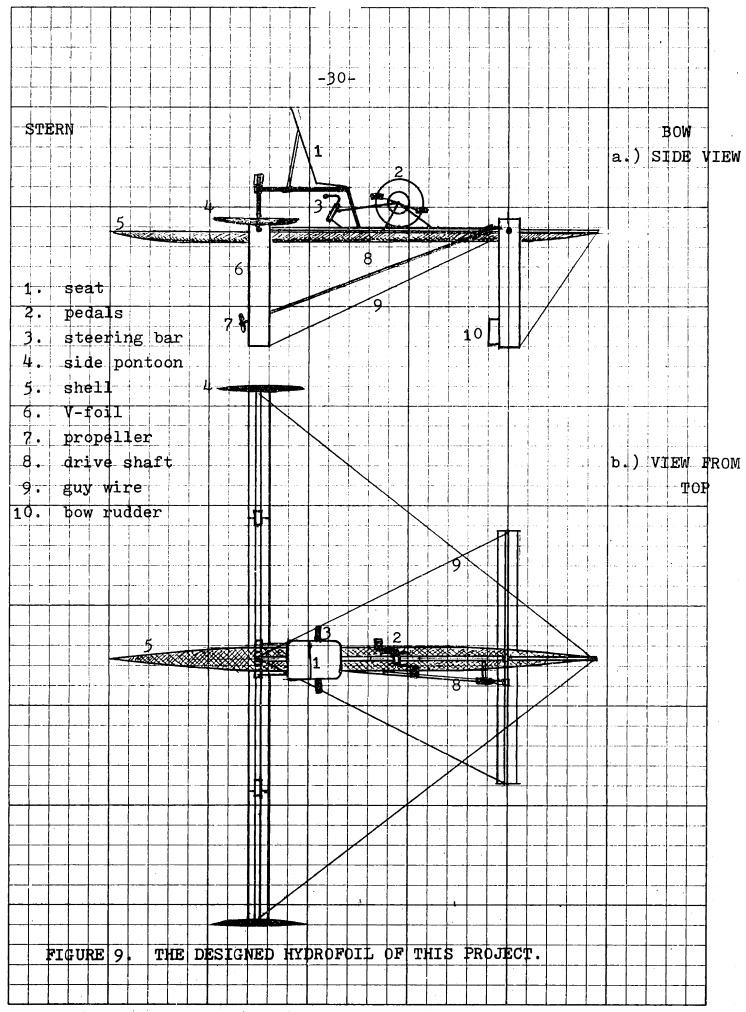 The human powered hydrofoil designed by M. Bradham Brewster in 1979
The human powered hydrofoil designed by M. Bradham Brewster in 1979
 Alec towing, Allan riding, the first hydrofoil configuration for Flying Fish, photo Alec Brooks
Alec towing, Allan riding, the first hydrofoil configuration for Flying Fish, photo Alec Brooks
Abbott and Brooks’s first challenge was to design and test the basic configuration for this new vehicle. They rejected the concept of starting with a single displacement hull to provide flotation at rest, due to concerns of stability and weight, and decided to explore the possibility of beginning with no displacement hull at all. They began with a conventional bicycle frame with a larger wooden t-shaped wing located beneath the rider and a smaller V-shaped foil connected below the bicycle forks to control depth and steering. This contraption was refined by repeatedly towing various versions and modifications behind a small skiff with an outboard motor. Their conclusions were that:
- A V-shaped front foil could successfully control depth with the main foil following the front and successfully “flying” when towed at 5-10 miles per hour
- Balance could easily be maintained by steering the front foil like a bicycle
- The V-sections created unacceptable drag during minor side-to-side steering movements
- A front foil shaped like an inverted T reduced drag dramatically with the top of the (inverted) T acting as a steering “rudder”
- The flying depth could be properly maintained by an “elevator flap” controlled by a small skimmer that followed the water surface.
The next step was to build a refined, human-powered version, Flying Fish 1. Flying Fish 1 began as a conventional racing bicycle frame. The bicycle crank and chain was connected to a smaller sprocket that turned a smaller ¼-inch-pitch chain. The chain connects to the propeller through a hollow strut, assembled as a mobius loop naturally twisting 90 degrees, to a small sprocket on the propeller shaft that was positioned at the junction of the strut and the horizontal wing. Brooks designed the wing and propeller, and Abbott-Brooks designed and built Flying Fish 1 almost entirely in their home workshops. The main and front wings were constructed of carbon fiber composite materials. Based upon original tow testing, the front wing was positioned further forward to improve pitch control and connected to the handlebars via a pushrod.
Flying Fish 1 was launched from a 20-foot catapult attached to a floating dock. The first testing took place in the early morning summer hours on at Puddingstone Reservoir near Los Angeles, California. Alec powered the catapult, and Allan was the rider. After two attempted launches that failed because of improper pitch control, the third launch resulted in a sustained flight that lasted one minute.
The first version of Flying Fish 1 had the distinct disadvantage of requiring a catapult launch, with the rider being dunked into the water at the end of each ride. Despite this, Steve Hegg, an Olympic gold medal cyclist, subsequently rode Flying Fish 1 to a remarkably fast time over the 2000 meter rowing course in the Long Beach Harbor.
The next step was to design displacement floatation so that “take-off” from a floating start might be achieved. The team did not know if the rider could generate sufficient power and speed to overcome the drag and extra weight of the flotation, but went ahead and fitted Flying Fish 1 with inflatable pontoons that supported the machine with the propeller and wings under water, and the rest of the machine and rider above the water at rest. The team was pleasantly surprised with the success of this arrangement; after 2-3 seconds of hard pedaling, the pontoons were lifted above the water and the hydrofoil “took off.” Subsequent flight required vigorous pedaling but could be maintained as long as the rider was able to provide sufficient effort. When pedaling effort was eased, the main wing would stall and the craft gently settled back onto the pontoons. Slow-speed progress could continue with little pedaling effort while floating on the pontoons. Flying Fish 1 created a sensation, being demonstrated and raced in several venues in the U.S. and Europe.
 Flying Fish 1 was initially launched from a catapult attached to a dock
Flying Fish 1 was initially launched from a catapult attached to a dock
video Steve Hegg beginning 2000-meter run
The world had never seen a “bicycle that could fly on water.”
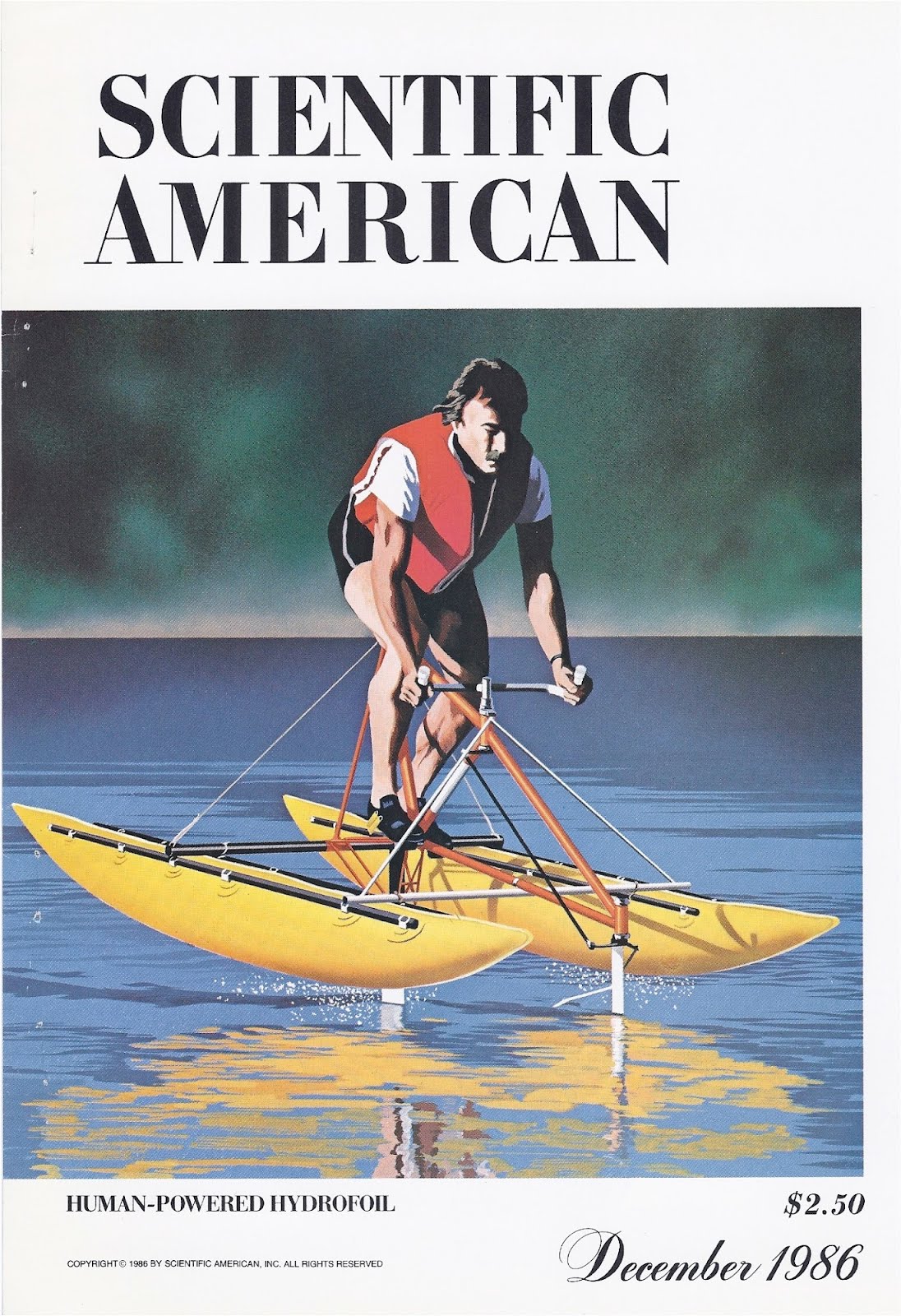 Flying Fish 2 appeared on the cover of Scientific American magazine in 1986, along with a feature article
Flying Fish 2 appeared on the cover of Scientific American magazine in 1986, along with a feature article
Flying Fish 2 was completely redesigned utilizing all that had been learned with Flying Fish 1. The frame was constructed of 4130 steel aircraft tubing, and the wings, struts, and drive train were hand built with the goal of maximizing performance over a 2000-meter course. In its first race over a 2000-meter course at EXPO 86 in Vancouver, Allan exceeded the previous world record set by a rowing shell. His elapsed time was 6 minutes, 39.64 seconds (9.37 knots).
On July 20, 1987 Steve Hegg rode Flying Fish 2 over the 2000 meter Long Beach Marine Stadium Olympic rowing course to a new world-record time of 5 min, 48.53 seconds (11.15 knots) recorded by officials of the IHPVA. This record still stands as of 2013.
Flying Fish 20 was a refinement of Flying Fish 2 designed to capture the DuPont Prize that was offered to the first human-powered water craft to reach or exceed 20 knots over 200 meters. A paper describing the “20-knot hydrofoil” by Alec Brooks is found at 20-knot-hydrofoil, Alec Brooks. The DuPont Prize rules allowed a wind speed of no more than 3 knots. If no vehicle had reached 20 knots by the end of 1992, the $25,000 prize would go to the fastest vehicle speed recorded by the end of 1992. The Flying Fish 20 wings and propeller were redesigned for higher top speed.
The DuPont Prize was won by a team from MIT led by professor Mark Drela with the “Decavitator”. The Decavitator used a large air propeller designed to take full advantage of a 3-knot tail wind as allowed by the prize rules. The Decavitator’s winning speed of 18.51 knots over 200 meters was attained on the Charles River in Boston with a tail wind near the 3-knot maximum allowed by the International Human Powered Vehicle Association. In a head-to-head competition on December 19 & 20, 1992 at Puddingstone Reservoir in California where the wind speed was negligible, the Decavitator’s speed was slightly slower than Flying Fish 20.
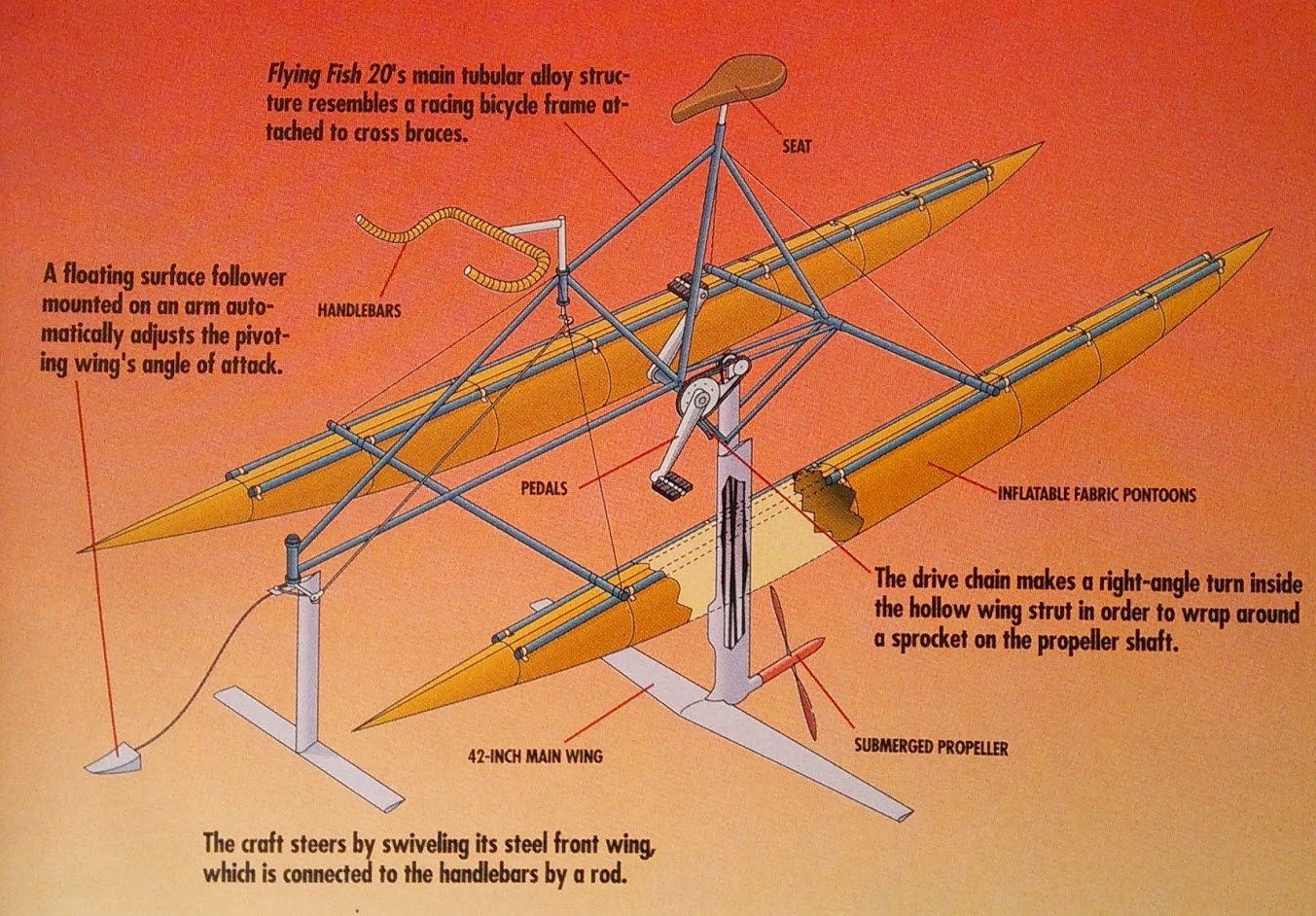 Drawing of Flying Fish 20, Popular Science Magazine
Drawing of Flying Fish 20, Popular Science Magazine
 David Woronets on Flying Fish 20, December 1992, photo Alec Brooks
David Woronets on Flying Fish 20, December 1992, photo Alec Brooks
Is a human-powered hydrofoil truly the fastest human-powered water vehicle? World records still list 8-man racing rowing shells as having the fastest 2000-meter times, however wind- and water current speeds are not strictly controlled.. Repeated attempts to arrange a side-by-side race between Flying Fish and an 8-man rowing shell, however have failed. Whenever an 8-man shell team hears of the 2000-meter time recorded by Flying Fish, the team declines a head-to-head race.
To date, human-powered hydrofoils remain the fastest human-powered watercraft, at least in terms of top speed. However, human-powered hydrofoils have some inherent limits to their practicality; 1) they require vigorous effort to fly, 2) even more effort is required if extra weight or cargo is added, and 3) they prefer relatively flat water and calm conditions in order to maintain the hydrofoils at proper depth. To test the possibility that a human-powered hydrofoil could “surf” on ocean swells, Flying Fish 2 was tested with poor results in open ocean during relatively flat conditions.
Over the past 2 decades, Human-Powered hydrofoils have proliferated all over the world. Some are propeller-driven, some utilize a flapping wing motion, and some have multiple riders. Spectacular competitions have been held in Japan. video of Japan human-powered hydrofoil competition
What will the future hold?
Allan Abbott, MD
allanvabbott@gmail.com
Alec Brooks, PhD
alecnbrooks@gmail.com